
 资(zī)讯
资(zī)讯
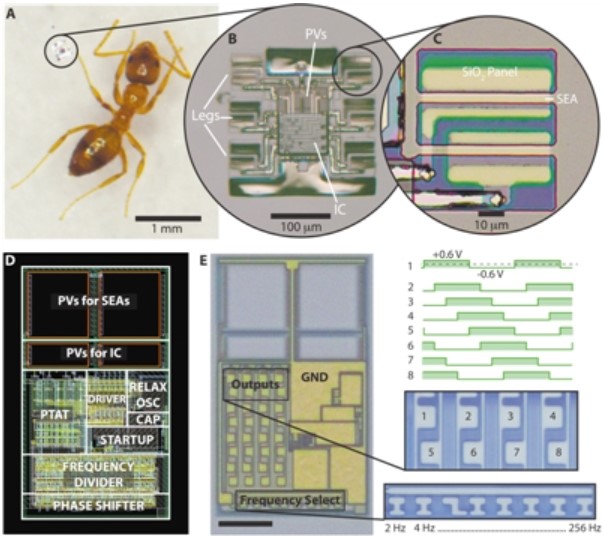
(A)蚂蚁旁边的微型机器人(rén)。(B)机器人的放大视图。(C)机器人的一条腿 ,由刚(gāng)性面板、活动铰链组成。(D)带(dài)有(yǒu)标记的(de)主要电路块的电路(lù)的CAD布局图(tú)像。(E)微型机器人(rén)控制电路的光学显(xiǎn)微镜图像。图片(piàn)来源:《科学·机器(qì)人(rén)》
据发表在21日的《科学·机器人》杂(zá)志(zhì)的论文,美国康(kāng)奈尔大学的研究人员在100到250微米(mǐ)大小的太阳能机器(qì)人上安装了比蚂(mǎ)蚁(yǐ)头还小的电子“大(dà)脑”,这样它们就可以在不受外部控制的情况下自主行走(zǒu)。
这(zhè)项创新为新(xīn)一代(dài)微型设备奠定(dìng)了基础,这些设备可以跟踪细菌(jun1)、嗅出(chū)化学物质、摧毁污染(rǎn)物、进行显微手(shǒu)术并(bìng)清除动脉(mò)中的斑(bān)块。
这(zhè)种(zhǒng)新(xīn)型(xíng)机(jī)器人的“大脑”是一个互补金属氧化物半导体(tǐ)(CMOS)时钟电路,它包含1000个晶体管,外加二(èr)极管、电阻器和电容器阵列。集成CMOS电路(lù)产(chǎn)生一个(gè)信号,该信号产生一系列相移的方波频率,进而设定机(jī)器人的步态。机器人腿是(shì)铂基(jī)制(zhì)动(dòng)器,电路(lù)和支腿都由光伏供(gòng)电。
新型机器人的大小仅为搭载在机(jī)载CMOS电子(zǐ)设备上的(de)大型机器人的(de)万分之(zhī)一,并且可以每秒(miǎo)10微米以上的速度行走。
研(yán)究(jiū)人员之前已经开发出了(le)可以(yǐ)爬行、游泳、行走和(hé)折叠自己的微(wēi)型(xíng)机器人,但总是有连接在一起(qǐ)的“线”。为了产(chǎn)生运动,这根电(diàn)线被(bèi)用来提供电流,或者必须让激光光(guāng)束直接聚焦到机器人身上的特定位置。
“以前(qián),我(wǒ)们(men)必须(xū)操纵这些(xiē)‘线(xiàn)’,才能从机(jī)器(qì)人那里(lǐ)得到任何形式的反应。”康(kāng)奈尔大学物理学教授伊泰·科恩说,“现在我们有了这些(xiē)大(dà)脑,仿佛从提线(xiàn)木偶上解开(kāi)了(le)绳子,就像(xiàng)匹诺(nuò)曹(cáo)有了意识一样(yàng)。”












报(bào)中心")
